SPI通信の習作です。
といっても、Arduinoの場合、誰かが作ってくれたデバイスドライバを探してきてインストールするだけなので、SPIプロトコルを直接操作するようなことはありません。
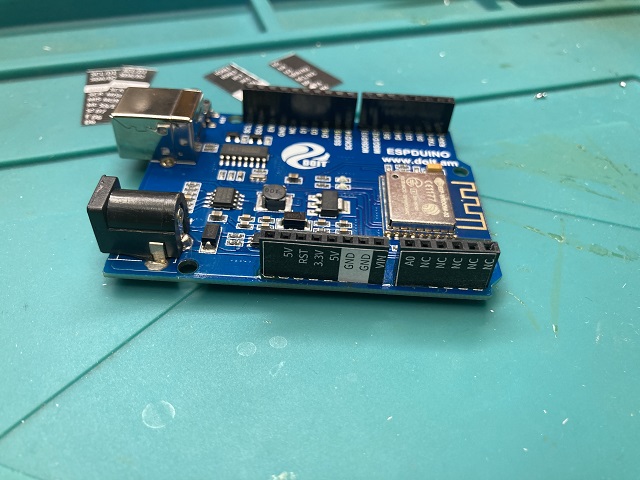
ハードウエア的にはこのようなものを用意し、2つのMCP41050を同時に操作し、アナログ電圧でフィードバックを取って動作を確認してみました。
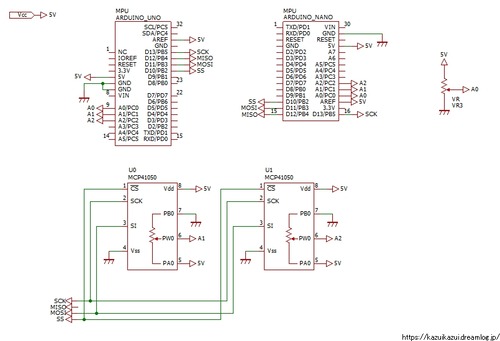
MCP41050のライブラリは、こちらから頂いてきました。
https://github.com/sleemanj/MCP41_Simple
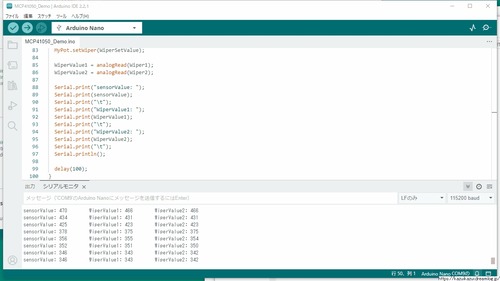
結果です。
ほぼ同期出来てますね。個体差も僅かです。
もう少し分解能が高ければ、可変抵抗で出力調整をしている機器をデジタル化するのに使えそうです。
惜しい。
以下ソースです。
といっても、Arduinoの場合、誰かが作ってくれたデバイスドライバを探してきてインストールするだけなので、SPIプロトコルを直接操作するようなことはありません。
ハードウエア的にはこのようなものを用意し、2つのMCP41050を同時に操作し、アナログ電圧でフィードバックを取って動作を確認してみました。

MCP41050のライブラリは、こちらから頂いてきました。
https://github.com/sleemanj/MCP41_Simple
結果です。
ほぼ同期出来てますね。個体差も僅かです。

もう少し分解能が高ければ、可変抵抗で出力調整をしている機器をデジタル化するのに使えそうです。
惜しい。
以下ソースです。
//// FILE: MCP41050_Demo.ino// AUTHOR: hirayama540-blog@yahoo.co.jp// PURPOSE: MCP41050 DemoPG// URL: http://kazuikazui.dreamlog.jp//// Rev.1 First release 2024.01.09#include <MCP41_Simple.h>MCP41_Simple MyPot;const uint8_t CS_PIN = 10;uint8_t CUR_VAL = 0;uint8_t DIRECTION = 1;uint16_t sensorPin = A0; // select the input pin for the potentiometeruint16_t sensorValue = 0; // variable to store the value coming from the sensoruint16_t Wiper1 = A1;uint16_t Wiper2 = A2;uint16_t WiperValue1 = 0;uint16_t WiperValue2 = 0;void setup() {Serial.begin(115200);Serial.println();Serial.print("MCP41050_LIB_VERSION: ");Serial.println("xxxx");Serial.println();delay(500);// put your setup code here, to run once:MyPot.begin(CS_PIN);// Analog SettinganalogReference(EXTERNAL); // the voltage applied to the AREF pin (0 to 5V only) is used as the reference.}void loop() {// read the value from the sensor:sensorValue = analogRead(sensorPin);uint8_t WiperSetValue = sensorValue / 4;// put your main code here, to run repeatedly:MyPot.setWiper(WiperSetValue);WiperValue1 = analogRead(Wiper1);WiperValue2 = analogRead(Wiper2);Serial.print("sensorValue: ");Serial.print(sensorValue);Serial.print("\t");Serial.print("WiperValue1: ");Serial.print(WiperValue1);Serial.print("\t");Serial.print("WiperValue2: ");Serial.print(WiperValue2);Serial.print("\t");Serial.println();delay(100);}